相機成像模型分析
來源:
閱讀:603
發(fā)布時間:2022-07-07 10:14:10

相機對于機器人來說就相當于人的眼睛�����,景物在相機中呈現(xiàn)的樣子就是機器看到的世界的樣子����。當我們理解了相機的成像原理�����,才能理解圖像中的景物與實際世界中景物的對應關系。
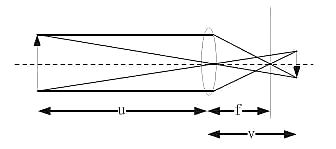
相機模型是光學成像模型的簡化���,目前有線性模型和非線性模型兩種����。實際的成像系統(tǒng)是透鏡成像的非線性模型�。基本的透鏡成像原理如圖所示:
其中 u 為物距���, f 為焦距��,v 為相距�。根據(jù)透鏡成像原理�,三者滿足關系式:
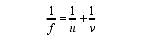
相機的鏡頭是一組透鏡,當平行于主光軸的光線穿過透鏡時�,會聚到一點上,這個點叫做焦點��,焦點到透鏡中心的距離叫做焦距 f。數(shù)字相機的鏡頭相當于一個凸透鏡�,感光元件就處在這個凸透鏡的焦點附近,將焦距近似為凸透鏡中心到感光元件的距離時就成為小孔成像模型����。小孔成像模型如圖所示:
基于上圖,當s和f相等的時候���,便是相機的成像模型����。小孔成像模型是相機成像采用較多的模型����。在此模型下,物體的空間坐標和圖像坐標之間是線性的關系�����,因而對相機參數(shù)的求解就歸結(jié)到求解線性方程組上��。
這里為了計算方便���,保持方向的一致性����,我們往往將圖像以光心為坐標原點,進行中心對稱旋轉(zhuǎn)����,也就是將圖像映射到光心和物體的中間,而物體在圖像中的映射點�,正好為物體與光心的連線和圖像平面的交點。
無論求解線性方程組還是非線性方程組�����,重要的是用方程描繪出物理模型���。那么就需要選取參考坐標系,而在機器視覺中常用的參考坐標系有四個:世界坐標系�����、相機坐標系�、圖像坐標系、和像素坐標系�。
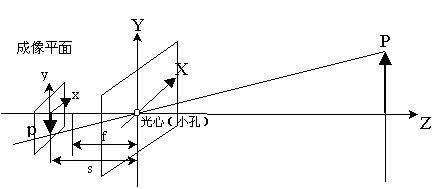
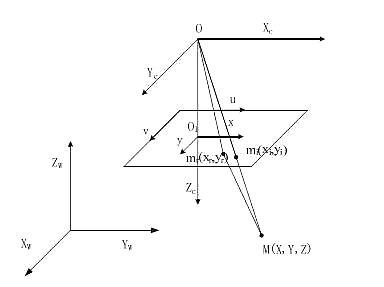
為了清楚的說明各種坐標系之間的聯(lián)系,我們首先看下面一個圖片�,圖片中包括了世界坐標系、相機坐標系和圖像坐標系的關系。接下來為大家詳細介紹一下每個坐標系的用處��。
世界坐標系:是客觀三維世界的絕對坐標系��,也稱客觀坐標系�。因為數(shù)碼相機安放在三維空間中,我們需要世界坐標系這個基準坐標系來描述相機的位置�,并且用它來描述在此三維環(huán)境中的其它任何物體的位置,用(Xw, Yw, Zw)表示其坐標值��。
圖像坐標系:以CCD 圖像平面的中心為坐標原點�,X軸和Y 軸分別平行于圖像平面的兩條垂直邊,用( x , y )表示其坐標值����。圖像坐標系是用物理單位(例如毫米)表示像素在圖像中的位置。
相機坐標系(光心坐標系):以相機的光心為坐標原點�����,X 軸和Y 軸分別平行于圖像坐標系的 X 軸和Y 軸���,相機的光軸為Z 軸�,用(Xc, Yc, Zc)表示其坐標值����。
像素坐標系:以 CCD 圖像平面的左上角頂點為原點����,X 軸和Y 軸分別平行于圖像坐標系的 X 軸和Y 軸���,用(u , v )表示其坐標值�。數(shù)字相機采集的圖像首先是形成標準電信號的形式�����,然后再通過模數(shù)轉(zhuǎn)換變換為數(shù)字圖像����。每幅圖像的存儲形式是M × N的數(shù)組����,M 行 N 列的圖像中的每一個元素的數(shù)值代表的是圖像點的灰度。這樣的每個元素叫像素�����,像素坐標系就是以像素為單位的圖像坐標系��。
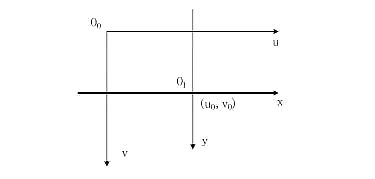
由于圖像坐標系和像素坐標系聯(lián)系比較緊密,可能有很多小伙伴也容易弄錯�����,這里在給出兩個坐標系的關系圖�����。
通過上圖我們可以看出來�,兩個坐標的原點有一定的偏差,往往就是圖像的長寬的一半����。
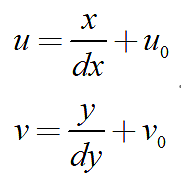
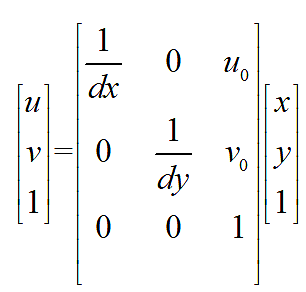
在介紹完坐標系后,我們需要來描述相機成像的數(shù)學過程��。根據(jù)像素坐標系和圖像坐標系的定義�����,我們可以得到如下關系:
其中(u0, v0)是圖像坐標系原點在像素坐標系中的坐標����,dx 和 dy分別是每個像素在圖像平面x和 y方向上的物理尺寸。
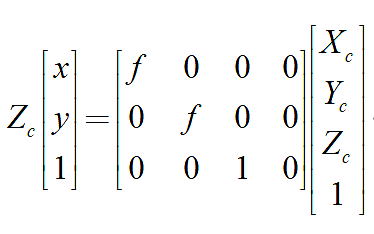
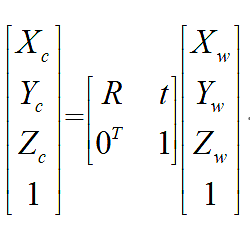
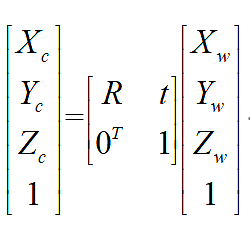
其中 f 為焦距(像平面與相機坐標系原點的距離)�。用齊次坐標系和矩陣表示上述關系:
其中 R 為3 × 3正交旋轉(zhuǎn)矩陣�����,t 為三維平移向量�。
上面等式中ax, ay分別是圖像水平軸和垂直軸的尺度因子���。K的參數(shù)中只包含焦距�����、主點坐標等只由相機的內(nèi)部結(jié)構決定��,因此稱 K 為內(nèi)部參數(shù)矩陣�,ax, ay , u0, v0叫做內(nèi)部參數(shù)���。Mt中包含的旋轉(zhuǎn)矩陣和平移向量是由相機坐標系相對于世界坐標系的位置決定的,因此稱Mt為相機的外部參數(shù)矩陣�,R和t叫做外部參數(shù),KMt叫投影矩陣����。相機標定就是確定相機的內(nèi)部參數(shù)和外部參數(shù)。
上面推導了相機投影成像的數(shù)學模型�,但是上面是在理想狀況下推導的��,實際上由于相機光學系統(tǒng)存在加工和裝配的誤差��,透鏡就并不能滿足物和像成相似三角形的關系����,所以相機圖像平面上實際所成的像與理想成像之間會存在畸變�。畸變屬于成像的幾何失真���,是由于焦平面上不同區(qū)域?qū)D像的放大率不同形成的畫面扭曲變形的現(xiàn)象�,這種變形的程度從畫面中心至畫面邊緣依次遞增�����,主要在畫面邊緣反映比較明顯��。為了減小畸變����,拍攝圖片時應盡量避免用鏡頭焦距的至廣角端或至遠端拍攝。實際的相機成像模型如下圖所示:
其中 mr(xr,yr)表示實際投影點的像平面坐標系下的物理坐標�����,mi(xi,yi)表示理想投影點的像平面坐標系下的物理坐標。
對于相機的畸變�,可以包括徑向畸變和偏心畸變和薄棱鏡畸變等。
理論上來說鏡頭都存在徑向和切向畸變��,但是通常徑向畸變較大�,切向畸變較小。
偏心畸變模型是由于多個光學鏡頭的光軸不能完全共線產(chǎn)生的�,這種畸變是由徑向和切向畸變共同構成的。
薄棱鏡畸變是由于鏡頭設計制造缺陷和加工安裝所造成的�����,如鏡頭與相機成像平面有一個很小的傾角等��。因為薄棱鏡畸變非常小����,通常不考慮。
相機的畸變可以由非線性模型來表示�����,由于公式比較復雜����,而且多數(shù)應用只在相機的標定中使用,因此這里小白只給出最后化簡后的畸變模型:
其中k和p都是畸變系數(shù)�,可以在標定的過程中求出該系數(shù)矯正相機模型。
如果你只是想簡單了解一下相機的原理�,不需要知道其數(shù)學公式,那么只需要知道小孔成像原理就可以啦~對于相機各種參數(shù)�����,可以用一種更容易理解的方式來解讀�����。
內(nèi)參數(shù)矩陣:告訴你上述那個點在1的基礎上���,是如何繼續(xù)經(jīng)過攝像機的鏡頭�、并通過針孔成像和電子轉(zhuǎn)化而成為像素點的�����。
外參數(shù)矩陣:告訴你現(xiàn)實世界點(世界坐標)是怎樣經(jīng)過旋轉(zhuǎn)和平移�����,然后落到另一個現(xiàn)實世界點(攝像機坐標)上。
畸變矩陣:告訴你為什么上面那個像素點并沒有落在理論計算該落在的位置上���,還產(chǎn)生了一定的偏移和變形�����。
(來源:網(wǎng)絡���,版權歸原作者,若有侵權請聯(lián)系刪除)



 津公網(wǎng)安備12010102000950號
|
津ICP備17001797號-1
津公網(wǎng)安備12010102000950號
|
津ICP備17001797號-1
